Nautilus Senior Design Project
Engineering
CMPE/EE-129A/B/C Senior Design Project
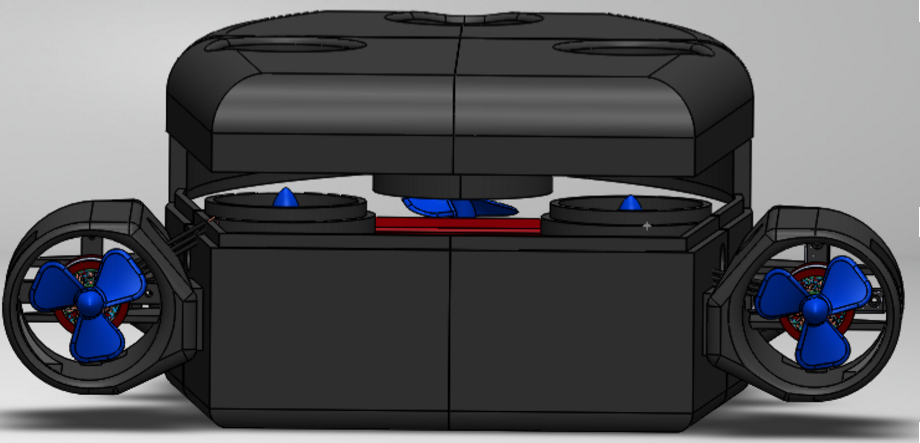
The goal of this project is to create an affordable underwater ROV that can be used in many applications, ranging from casual photography to Search and Rescue. Once completed, the user will be able to control the drone via multiple
remote operation modes. These modes include wired connection via ethernet to a laptop, wireless via
mobile device connected to a WiFi access point, and lastly, by equipping an ultrasonic transmitter belt that
the drone will follow autonomously.
Wired and wireless operation over WiFi will allow the user to remotely control the drone while
viewing a live feed of the built in 1080p hd camera. The user will also be able to view dials including a
compass, depth sensor, temperature sensor, and even toggle LED lights for deep water illumination. Our intent is to design the
underwater ROV robust enough to conquer depths of up to 150ft, and have a battery life of over an hour,
all while keeping the cost as obtainable as possible for the masses.
Most submersible drones that exist today are large, costly, and developed purely for research. While
there are a few underwater drones that exist in the commercial market, these have price ranges too high
for casual drone enthusiasts like ourselves. With the market for aerial quadcopter drones booming, we
believe that a cheap and easily accessible underwater ROV with our aforementioned feature set has a
valuable place in the commercial drone market as well as in humanitarian usages such as Search and Rescue missions.